
During kick-off weekend we watched the reveal video and learned the rules of the game so that we could come up with a strategy for playing the game. We determined that our robot must:
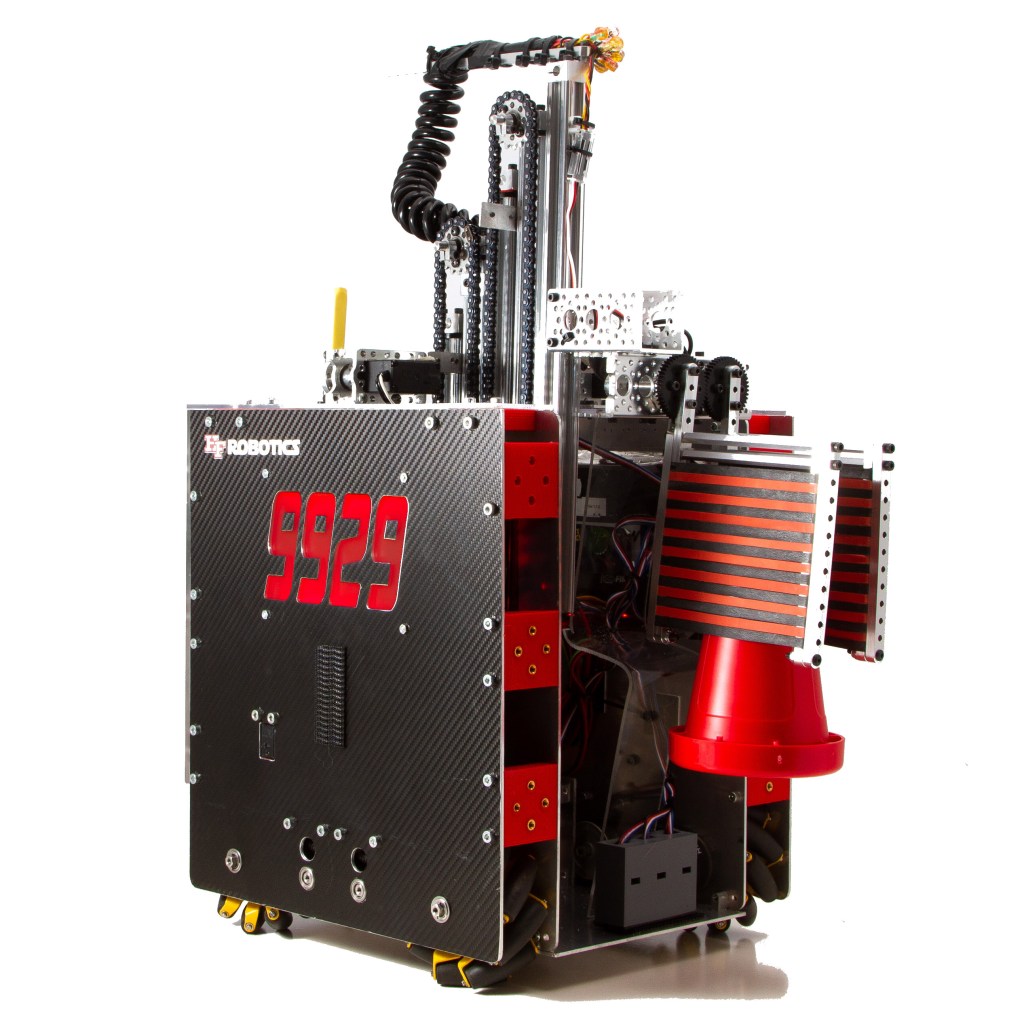
- Be fast – the robot has to cover the entire field and score quickly, this requires a fast drive base as well as sub-second intake and release, and a 1-2 second lift.
- Be maneuverable – the robot has to be small (12 inch square footprint) to navigate obstacles on the field.
- Lift over 33” – to reach high junction
- Be robust – we cannot score points with a broken robot
- Be easily serviceable – to be able to fix the robot quickly between matches
We also determined that game practice and strategy would play a significant role in our team’s success this year.

was not drivable.

During our first and second league meets, our drive team refined their strategies on how to score the most points. We used this experience to develop a match planning sheet that would allow us to quickly plan a match with our alliance partners:
Our beacon fits on a cone, allowing us to score both a cone and the beacon at the same time. We have gone through a few beacon designs throughout the season:
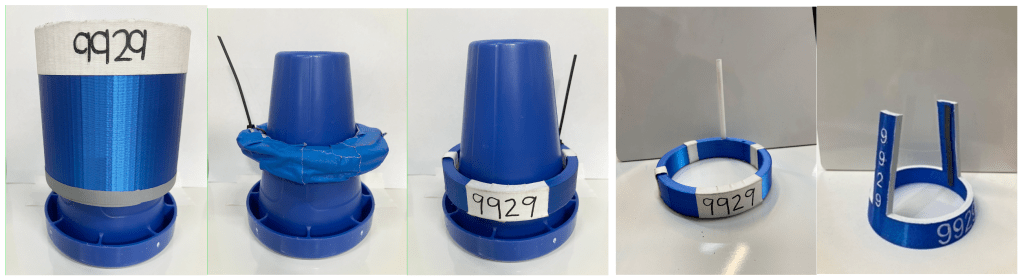
For autonomous we experimented with AprilTags and OpenCV color detection. The AprilTags proved to be too sensitive to slight misalignments so we selected OpenCV color detection. We printed our own sleeves, and use colors that are “far” from colors on the field.

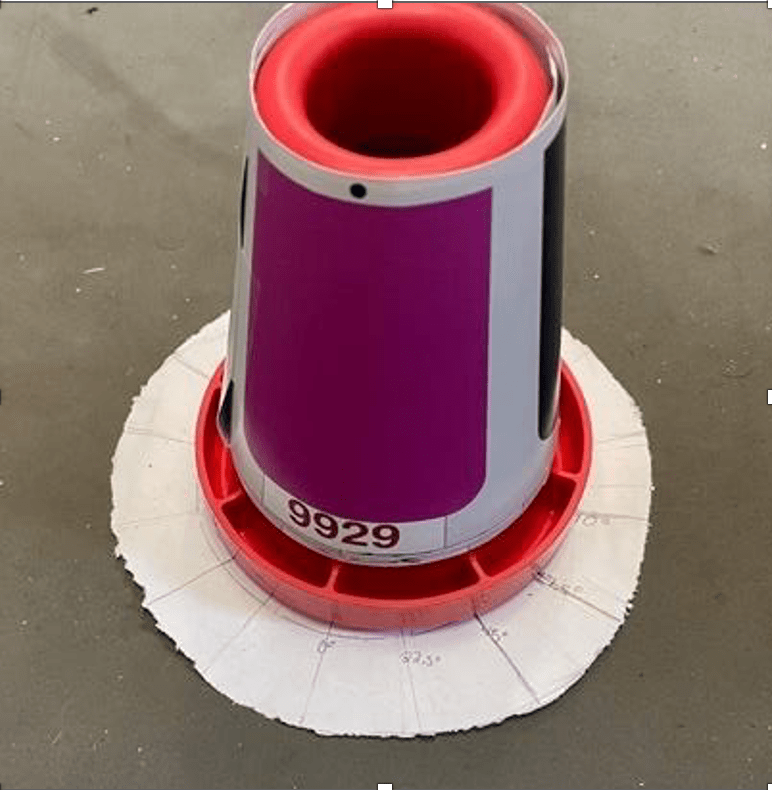
With the signal sleeves above, we quickly programmed an autonomous that would park in the correct signal zone according to a custom sleeve we designed.Later in the season, we programmed the robot to score on the low goal during autonomous. At this point in the season, our team reliably scores 20 points in autonomous, and 70 to 80 points in tele-op.
